特斯拉, 要跟华为开战了?
出品丨虎嗅汽车组
作家丨周至
头图丨视觉中国
一直以来,智能驾驶功能“王不见王”的样子,如今要有变化了。
本月初,有特斯拉职工在进行直播时“不测”中露馅,FSD(Full-SelfDriving,“完全自动驾驶”功能)的内测版V12疑似正在中国进行测试。解析,在握住了信息安全合规问题之后,在好意思国大杀四方的FSD,终于有望来中国和华为城区NCA一决险阻了。
不外关于两家企业的高阶智驾家具,究竟谁在中国的走漏会更利弊这个问题,外界一直有不少争论。一些东说念主以为,中好意思两国的说念路环境、交通章程和用户风气皆存在不小的区别,因此FSD来到中国注定会水土起义,在华为眼前落得下风。
然则,险些每一个相通的时间东说念主士皆告诉笔者,特斯拉在端到端架构上取得的最先上风,全皆阻遏小觑。因为在好意思国,照旧完毕量产的FSDBETAV12给到了全球车企与科技公司饱和大的轰动。
那么问题来了,由特斯拉率先量产,且在国内被华为、蔚小理往往说起的端到端架构,到底是什么?特斯拉如今“仅剩”的这一项上风,其里面旨趣到底是什么?为此,虎嗅汽车暗信号团队经过多方访谈和调研,为寰球呈现这一前沿和复杂见解背后,时间旨趣和工程难点到底有哪些。
端到端:这边猪进去,那儿腊肠出来
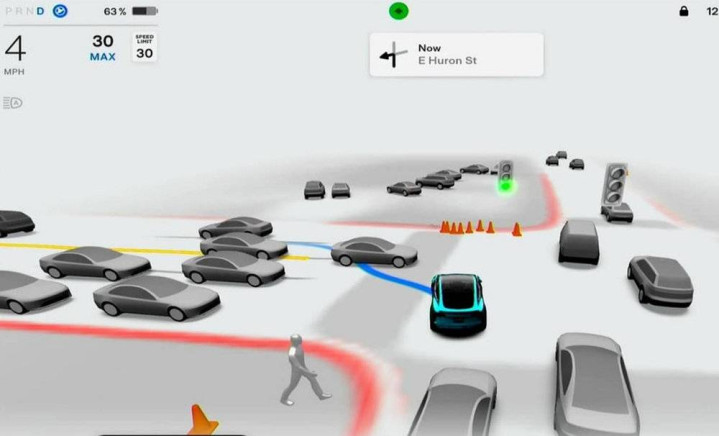
只须你在B站或者各样带有视频内容的应对网站上搜索“特斯拉FSDV12”,就能看到大皆好意思国车主晒出的FSD体验视频。在这些视频中,照旧升级到最新系统的特斯拉汽车在深重的好意思国街说念中,智驾走漏号称“类东说念主”。

从上图不错看到,车主驾驶的ModelY在路遇园林工东说念主锯下的树枝时险些“没打磕巴”,在无需禁受的气象下径直主宰车辆绕开了袭击物。
而在更多视频里,特斯拉汽车完成了太多刻下其他品牌车型智驾功能莫得的走漏:面临正在施工的说念路,在桩桶的辅导下驶入对向车说念逆行,并在施工路段扫尾后回到正向车说念;在莫得红绿灯的十字街头,准确驯服“STOP”标记泊车并比及左侧车辆先行;在到达目的地后并不立地退出,并会在东说念主类驾驶员莫得给出进一步指示的前提下,自动靠边泊车。而淌若该场合无法靠边,便自动上前行驶寻找车位……
这一切完毕的基础,就是智能驾驶的端到端架构。在笔者看来,这关于汽车而言可谓是第一个接近于ChatGPT的发明,将极地面改善智能驾驶体验。
所谓端到端(end-to-end)架构,其对应的是如今绝大多数车企接纳的模块化架构。在往常,工程师们将一辆车的智能/自动驾驶分为感知、决策不时和终结分为三个模块:感知、决策和终结。
其中,感知模块通过车身传感器信息的接入,完毕对说念路中车辆、行东说念主以及各样袭击物的识别,并完成对车辆自身的精细则位。决策和终结模块(PlaningandControl)负责关于前线迁徙袭击物的轨迹、速率进行预判,并不时出车辆行进的门路,保险车辆安全行驶。临了,系统将野心得出的操作指示下发给油门、刹车和转向系统,操作车辆行驶。
关于这个架构,其实咱们不错交融为“章程扩充器”。无论是感知到袭击物特征,并基于数据库对其进行分类,照旧在具体场景中把柄周遭环境变化而进行相应的操作,系统皆是把柄一条条工程师写好的章程进行扩充。在业内,模块化的智能/自动驾驶架构也叫作念“rule-based”。
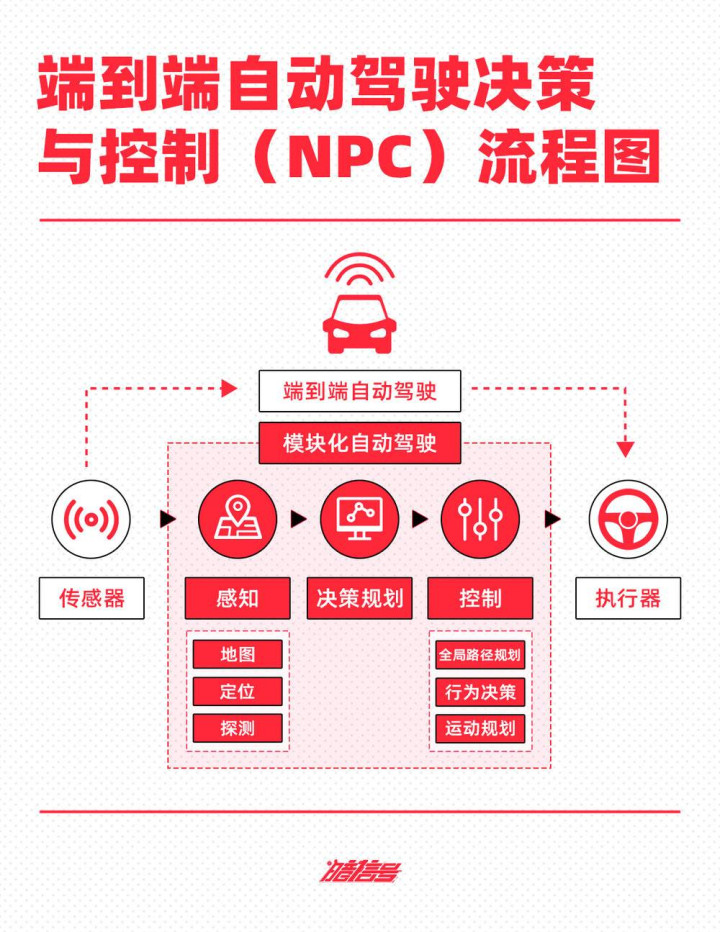
但端到端的架构下,系统将感知与PNC模块径直打包进了一个大模子。传感器的数据径直输入到模子中,经过野心后径直输出终结,发送给扩充器。而大模子则是基于大皆测试车辆以及用户实质驾驶的真实数据进行教师而成的,能够主动学习东说念主类的驾驶风气。
从上图中就不错看到,传感器通过大模子径直畅达到了扩充器,这就是所谓的“端到端”。用一个不允洽的例子来讲,这就非常于一个举座打包的食物坐褥线:这边猪跑进去,另一边腊肠、卤煮、肉皮冻径直出来。
比拟较模块化,端到端架构的上风不言而谕。最先,系统不再是基于由工程师所编写的章程进行决策和终结,而是通过数据驱动(data-dirvien)完毕成长,这就让系统处理问题具备了泛化的能力。
在往常,淌若面临章程中不存在的场景,模块化架构的智能汽车时常会退出系统并教导驾驶员禁受,抑或选择了作假的操作形成事故。而端到端架构则能够在面临极点场景(也就是cornercase)时,像东说念主类相通基于“直观”选择包括绕行、避险乃至“硬开”等样子行驶,从而极地面普及安全性和用户体验。
其次,比拟较由一条条章程和一个个模块组成的老系统,端到端架构能够在普及决策效果的同期,极地面裁汰了代码量。例如特斯拉就宣称,FSDBetaV12系统比拟较往常,减少了30万行代码。这不仅会裁汰车端的存储压力,还能极大普及系统的答允度,从而改善运行效果。
临了,亦然最紧要的少量,端到端架构是一个实在的“大模子”,照旧具备了东说念主类驾驶员的部分特征。在改日跟着模子教师数据量的不息普及和迭代,咱们有望在端到端架构下顺利打造汽车东说念主工智能,并最终取代东说念主类驾驶员,完毕实在的L4级无东说念主驾驶。
更紧要的是,模块化的架构尽管在积攒了饱和多的战术后能在平时说念路环境中顺畅行驶,但面临“接洽外”的场景(也就是cornercase)时,仍然会退出或作念出作假决策。这不仅影响用户体验,还会发生危急。
但实在形成了AI大模子能力的端到端架构不再基于既定的章程进行不时和终结,而是能够像东说念主相通,凭借“警戒”和乃至“直观”开车,因此不再强调对cornercase的学习,能带给用户更接近于东说念主类的驾驶体验。
不外,纵令业界皆照旧解析了端到端架构的克己,但于今在量产车上该时间的汽车品牌,也有且仅有特斯拉一家。因为从时间本人的完毕上看,要让车辆像东说念主相通预测说念路上其他交通参与者的行径,并制定安全高效的行驶战术,号称是自动驾驶时间中,最难的一个任务。
怎么让机器像东说念主相通开车?
需要证明的是,国内一些企业照旧在宣传我方完毕了“大模子上车”。然则,他们目下只是是将感知部分完毕了“端到端”。其实,在感知层面收样子谓的数据驱动,依旧只是让系统自主识别方针物类型、说念路环境特征并通过高精舆图等样子完毕车辆定位,后续的PNC依旧需要依照工程师写好的战术扩充。而这照旧是业界的通行决议了。
然则,唯有一半的大模子,解析不是实在的“端到端”。正如前文所述,事情的关键在于,能不成让车辆像东说念主相通,在“看”到并意识到前线说念路环境后,自主选择最优旅途前进。
要交融这一问题,咱们最先要拆解,PNC完毕端到端的过程中需要握住哪些问题。在旧年的9月的NIOIN2023蔚来立异科技日上,该公司智能驾驶研发副总裁任少卿曾共享过该公司的端到端PNC时间架构,属于业界罕有的,能公开垦挥素养时间念念路的实质案例。通过他的解读和而已领路,咱们能够关于PNC过程中需要握住的问题,有一个未必的框架。
需要证明的是,蔚来的决议在业界也并非唯一无二,寰球的时间门路其实大同小异。收用该公司看成案例的原因,在于这是公开而已中,笔者能够找到的,相对而言最为了了全面的一个。

最先来看蔚来总共PNC的不时方面,如图所示,在一个路口的典型场景,系统在经受到传感器的信号后,会对环境中的动态物体和静态物体进行分类,并筛选出在车辆行驶旅途上,可能会形成影响的方针。
伴跟着时间的变化,交通参与者下一步的行径也会随之篡改。淌若想要尽可能提前更多时间预测方针行径,难度就会几何级普及。例如,系统若想预测10个方针物体此刻可能的行径,其复杂度为2^10=1024,那么提前5秒预测的话,复杂度就飞腾到了1024^5,也就是10^15。
在其中,系统会愚弄动态场景编码、动态元素编码、动态元旧友互编码和动静态交互编码关于每一个方针物,也就是交通参与者的行径进行预测,最终得出可能的交互终结。
在上图最右侧的交互场景抒发中不错看到,淌若路口中有10个交通参与者,最终把柄摆列组合不错形成10~100种预测的交互模式。
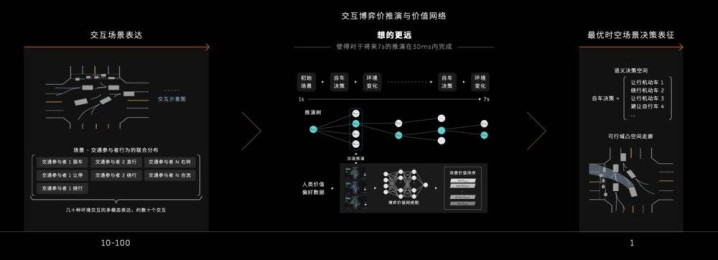
在取得环境交互的场景抒发终结后,系统就需要把柄关于其他交通参与者的行径推演,完成进一步对车辆行驶的旅途进行不时了。蔚来的方针是在30毫秒内对环境改日7秒的交通环境进行预测,这比模范电影中的一帧画面的时间还短。
在这过程中,车辆关于不同交通参与者存在可能的多种决策。例如来说,关于第一辆车,系统可能会选择让行、绕行、加快通过,关于第二个行东说念主也可能有让行、左侧绕行、右侧绕行等等多样决策。而对前一个参与者产生不同决策之后,后一个方针也会例必产生四百四病。因此就产生了图中央部分的决策树形结构。而系统需要的,则是选择最优解,高效、安全地通过路口。
防范,其中最关键的部分来了:工程师需要在这一过程中,为系统成态度景价值排序,辅导系统收用最好旅途。例如排在第一的可能是保证乘客的沉静,第二是通行效果,第三是安全,第四是驯服交通轨则……诚然这些只是笔者的例如,不同企业可能会有分别。但这一切的中枢目的,皆是让车辆在PNC的过程中,价值取向和东说念主类更接近,从而提供最沉静的决策决议。
在模子迭代的过程中,这被称为RLHF(东说念主类反应强化学习),是工程师需要大模子强加学习的部分。为此,开垦团队会给系统喂大皆用户的实质驾驶行径数据,以非常他交通参与者关于车辆行径反应的数据。
说句题外话,之是以包括特斯拉、蔚来、小鹏等绝大多数智能汽车品牌会关于用户的驾驶行径进行评分,并关于评分高的用户优先推送智驾功能,其背后的另一个原因便在于这部分高分用户的驾驶行径关于系统而言是优良的学习数据。车企的这种作念法一方面是给用户以安全驾驶激发和辅导,另一方面亦然辅导更多用户普及驾驶的表任性,进而为系统提供更多优良数据。
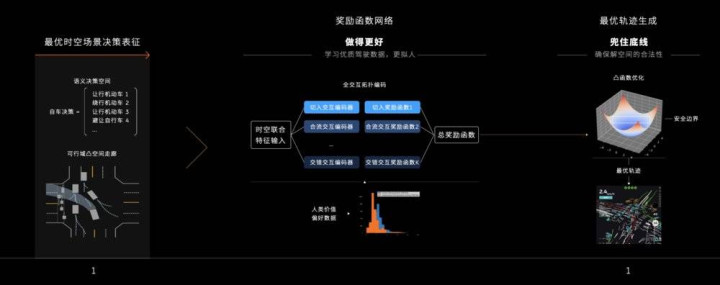
临了在决策树中收用了最好旅途后,系统会得出图片左侧夸耀的“可行域凸空间走廊”。在这条可通行区域里,大模子集聚拢全交互拓扑编码,以及再一次类似东说念主类价值偏好数据,最终身成右图中最优的行驶轨迹。
上头这一段翰墨可能有些烧脑,但这照旧是笔者用最简便平实的言语,聚拢蔚来的时间决议给诸君阐释出的PNC旅途。这时可能有效户就要问下一个问题了:既然技艺和旅途照旧握住了,为何目下端到端架构照旧莫得量产上车呢?
这就需要提到下一个问题:大模子的不可评释性,和车企开垦规程之间的矛盾和突破了。
车企的模范“老鞋”,走不了端到端的新路?
关于大模子的不可评释性,好多东说念主可能照旧略有耳闻。关于这个见解,简而言之,由于大模子是通过大皆的数据教师而成,但其怎么得出具体终结的过程并不透明,无法像传统章程算法那样进行阐发评释。例如来说,就是无论是ChatGPT照旧文心一言,皆无法幸免在一些专科问题上“瞎编乱造”。
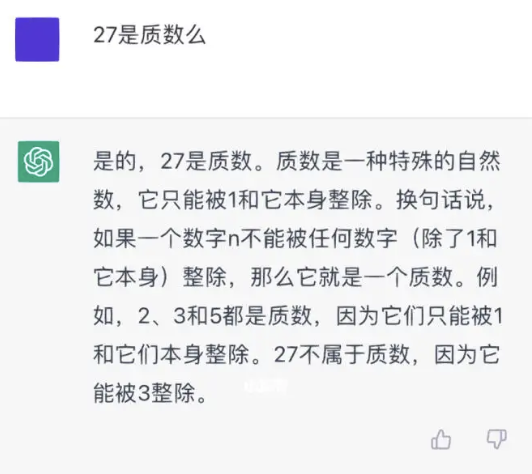
“是以,27到底是不是质数?”
关于一个聊天机器东说念主来说,这解析不会出太大的事故,但放在以安全为准绳的汽车行业,就是一种不可接受的行径了。尤其是关于好多依靠供应商提供智驾决议的传统车企来说,怎么验收端到端架构的智能驾驶系统,一直是个难题。
在国内某著明智能驾驶公司任职的不害(假名)告诉笔者,他也曾做事过一家著明德系豪华品牌。该公司像好多汽车企业相通,关于智能驾驶功能有着一套颗粒度精细到代码层的开垦模范,其中包含跳跃100个safetygoal(安全方针),其中触及AEB(自动紧要制动系统)的就有7个。关于其中的每一项,车企皆会打分,并对代码进行审核。
例如来说,其中一条安全方针是这么写的:
“条目神气:莫得可用的或需要褂讪化相干系统的制动打扰应被防护。安全气象:AEB不进行纵向终结打扰。”
“接受模范:最大故障注入后横摆率变化取决于车速。故障注入后10秒内的方针值如下:车速80km/h时为4°/s,车速130km/h时为3°/s”
很晦涩是吧?实质上笔者收用的是其中最短的一条。不害涌现,这些安全方针一方面为车企的验收提供了指引,另一方面也给供应商的开垦给出了标的。这套过程蓝本在模块化架构下运行得很顺畅,但关于端到端智能驾驶而言却无法适配了。
“传统车企关于功能安全、预期功能安全的相干接洽,是基于FSC(功能安全见解)、PSC(家具安全案例)和SSR(系统安全条目)进行的。基于各家车企SSR的不同,供应商会各自写代码开垦家具。”不害说说念。

传统的汽车测试,只可考证“功能”,而无法侦察“能力”
解析,关于模块化架构的智能驾驶,车企是有一整套开垦指引和验收模范的,能够从代码层面确保功能安全。但关于参数复杂且处于黑箱气象的端到端架构,车企无法保证其在平时行驶的过程中不会出事故。
换句话说,通过驾校的教师,只可证明一个东说念主具备了基本的驾驶学问,拿到了开车起程的资历。但此东说念主到底开得好不好,以及会不会因为大脑短路,开车冲入了河里,这事驾校无法保证。
“也就是特斯拉这么的汽车企业,能够一定进程上绕过汽车行业的传统开垦模范,完毕端到端架构上车。”不害玩弄说念,“这事放在传统车企,软件和测试部门深信通不外。”
其实就算是特斯拉,其FSDV12也并非一个自始至终的端到端架构智驾系统,其上还有个3000行代码摆布的战术“安全壳”,以便兜住安全的底线。“例如,当大模子操作车辆向左变说念后,淌若左侧后向右车辆高速驶来,安全壳中的战术章程就会制止此次变说念,把风险躲藏掉。”不害先容说念。
不外,这个安全壳到底毕竟是一个打补丁的产物。其中到底要消释若干场景,依旧是工程师们需要念念考和弃取的问题。更况兼,淌若安全壳作念得太大,又非常于回到了模块化架构下,俨然误打误撞。
诚然,端到端架构要完毕量产上车,需要面临的挑战和发愤远不啻文中提到的这些,笔者只是收用了其中几个比较有代表性的问题进行先容。但尽管如斯,端到端架构比拟较如今模块化架构的上风,依旧是在代际档次上的。信赖跟着咱们国内繁多汽车品牌,尤其是新势力们的悉力,搭载端到端架构的智能汽车很快就将和咱们碰头了。
写在临了:
正如前文提到的,比拟较传统车企,像特斯拉这么的造车新势力们在端到端架构的量产节拍方面,未必率会领有更大的上风。实质上从本年下半年开动,就将有越来越多的汽车品牌在我国绽放新时间的量产委派。
华为在本年4月北京车展前的发布会上涌现,接纳了端到端架构的ADS3.0,瞻望会首搭在享界S9上;小鹏在上个月的AIDay上书记将上线端到端大模子,并在本年8月完毕“天下每条路皆能开”;蔚来在本年上半年上线了端到端的主动安全功能,并不才半年量产端到端城市智能驾驶;联想则在这方面的传播相对“搂着”,只是说在本年三季度推送“无图NOA(城市领航辅助)”,在本年年底或来岁年头推出端到端大模子驱动的L3自动驾驶体系。
解析,淌若特斯拉本年三季度果真能在国内推送FSD的V12版块的话,将未必率会碰到一场国内汽车品牌的“三英战吕布”。究竟逐鹿中原,解析是一场值得期待的好戏。
注:额外鸣谢智能驾驶公司时间东说念主员“不害”对本文提供的信息赞助